Expanding Your Autoware Platform with ROS
Autonomous Drive Development
a cost-effective, full-stack solution tailored for educational purposes. This solution leverages open-source software and integrates a robust driving sensor system into versatile all-terrain robot, making it suitable for urban and off-road environments.

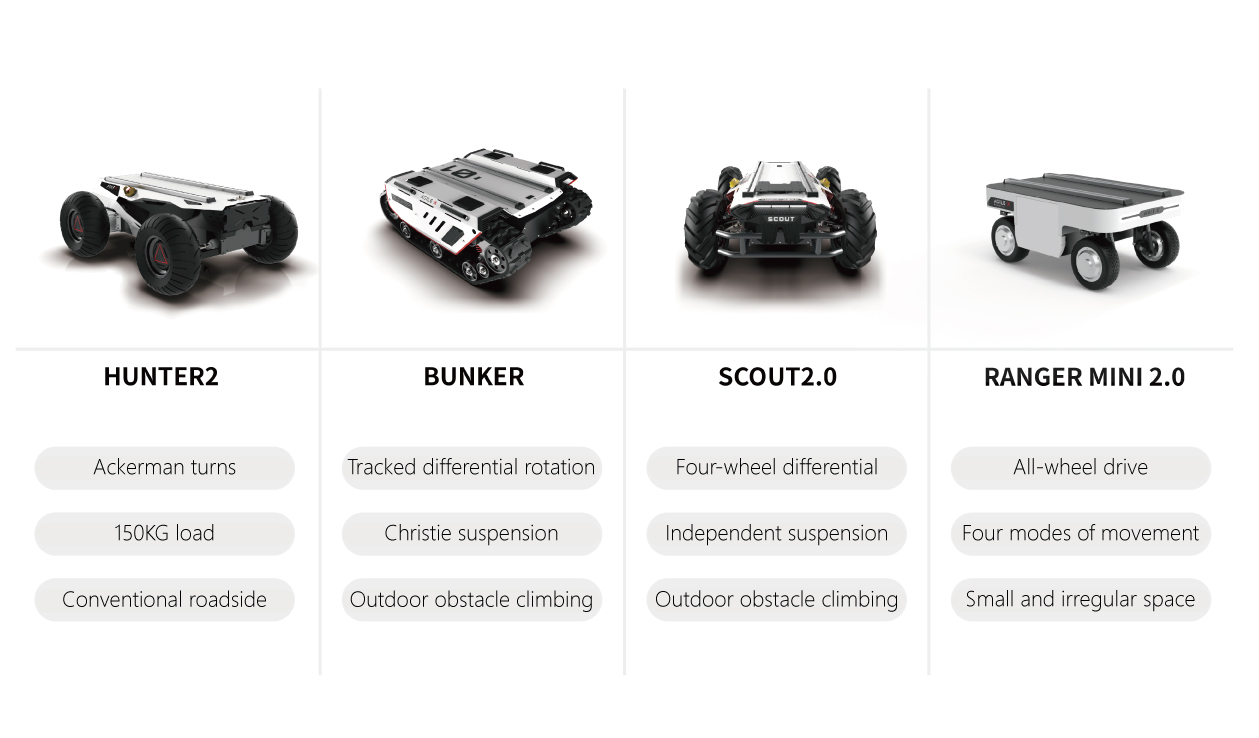
Supports all AgileX mobile robots
Auto kit compatible with the Hunter 2.0, Bunker, Scout 2.0 and Ranger mini 2.0 mobile robots

Build Autonomous Robots Using ROS
Maximize ROS potential with the Auto kit. Create pro applications, customize performance, and add GPS, depth camera, or line-following modules. Tailor your robot for autonomy. Explore ROS without limits.
Tutorials and Sample Codes
We offer comprehensive tutorials and sample code, covering everything from beginner to advanced levels. You'll gain a deep understanding of robot motion control, communication, navigation, map construction, and more.
Suitable for multiple chassis
applications covering all terrain scenarios
Technical Params
hunter2.0 |
SCOUT2.0 | |||
Dimensions980*745*380mm W*H*D | Wheelbase650mm | VS | Dimensions930*699*349mm W*H*D | Wheelbase498mm |
Track605mm | SuspensionForm Front WheelIndependent Suspension | VS | Track582mm | Weight67KG(±1) |
Working Temperature10~45°C | Battery24V30Ah(Standard) 24V60Ah(Optional) | VS | MAX Speed1.5m/s | Minimum Ground Clearance135mm |
Speed and Payload1.5m/s, 100Payload (Standard) 2.7m/s, 80KG Pavload (Optional) Customizable | MAX Travel(without loading)22Km(24V30Ah Battery) 40Km(24V60Ah Battery) | VS | Braking MethodServo brake | Minimum Turning Radius0m in-situ Rotation |
Weight65~72KG | Minimum Turning1.6m | VS | Climbing Ability<30° With Loading | Obstacle Surmounting Capacity15cm Single-stage Right-angle Stair |
Charger Time3.5h(24V30Ah Battery) 7h(24V60Ah Battery) | ChargerAC 220V Charger Output 240W | VS | Minimum Braking Distance0.2m 6km/h>0km/h | MAX Travel15km |
Climbing Ability<10° With Loading | Outward Supply24V15A Maximum total output current | VS | Drive FormFour-wheelIndependent Drive Four-wheel Differential Steering | Safety EquipmentAnti-collision Tube |
Obstacle Surmounting Capacity5cm Single-stage Right-angle Step | Code Disc Parameters2500 Lines MagneticIncremental Encoder | VS | Operating Temperature10~45°C | ChargerAC 220VIndependent Charger |
Minimum Ground Clearance100mm | Minimum Braking Distance0.2m 6km/h -> 0km/h (lt depends on the ground conditions) | VS | Charging Time2.5~3H | Voltage24V |
MotorDrive 2x400W streeing 400W Servo Motor | Communication InterfaceStandard CAN 232 Serial Port | VS | Motor4 X 400W Brushless Servo Motor | Battery24V30Ah(Standard) 24V60Ah(Optional) |
Steering Accuracy0.5° | Protection LevelIP22(CustomizableIP54) | VS | Code Wheel2500 Lines MagneticIncremental Encoder | CommunicationinterfaceStandard CAN 232 Serial Port |
Parking FunctionElectromagnetic power-off parking maximum 10° ramp parking(For parking only) | VS | Suspension formFront Double RockerIndependent Suspension Rear Double RockerIndependent Suspension | Protection LevelIP22 CustomizableIP44IP64 | |

