Multi-modal ROS Robot Development Platform
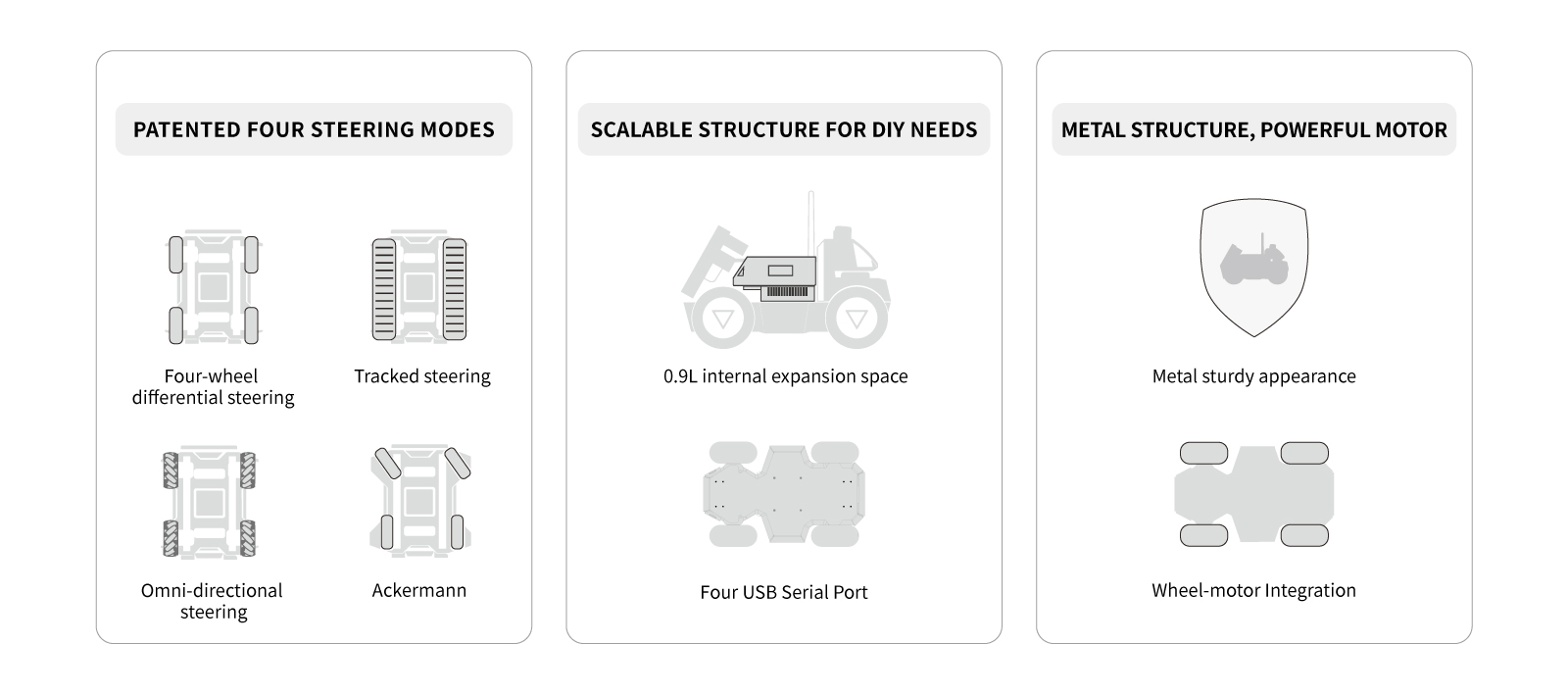
LIMO is a scalable structure and fully ROS compatible, ideal for working on applications requiring auto navigation. This mobile robot is perfect for students (in robotics engineering, electrical engineering, computing, etc.) and for robotics challenges.
Four-wheel Differential Steering Mode
makes driving on any surface easy. Whether it's smooth concrete or sandy roads, it works well. This flexibility is great for developers to research different applications.

Support ROS and Gazebo
The LIMO mobile robot easily connects to open-source ROS (1 and 2) and the Gazebo simulator. This connection provides access to a wide range of free demos and sample programs for developing your own artificial intelligence.
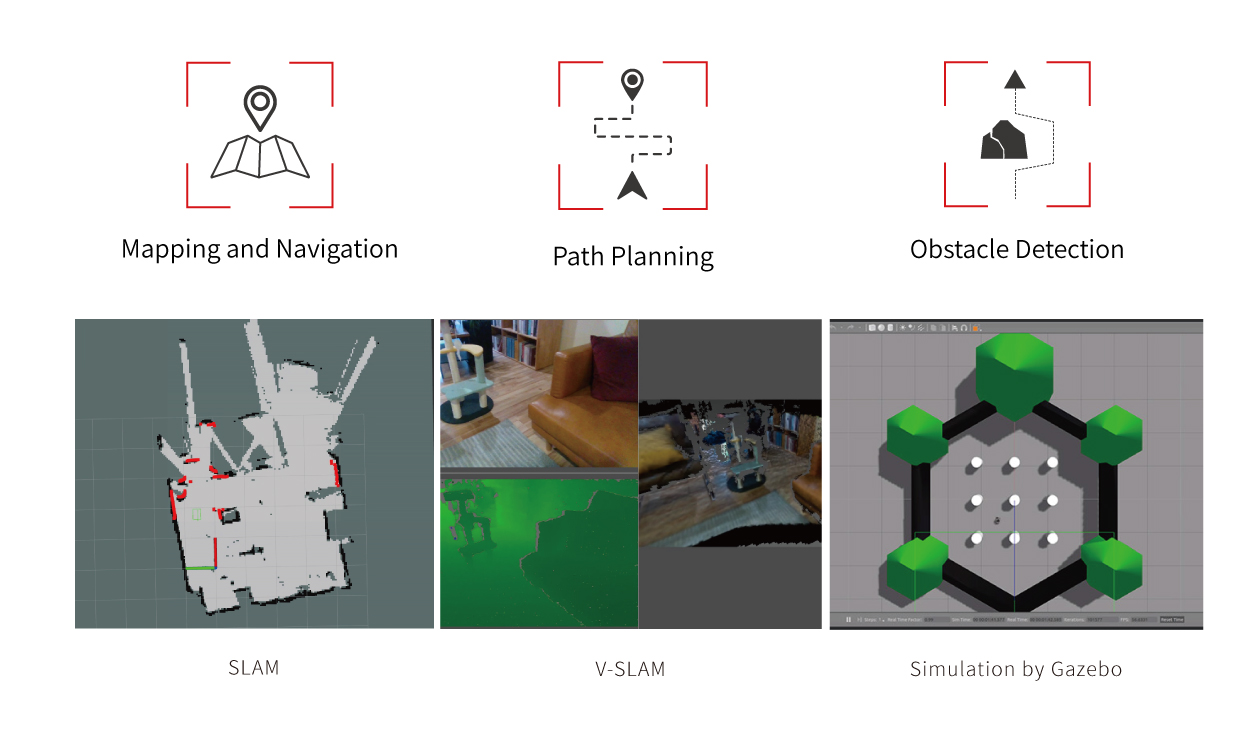
Autonomous Navigation Applications
LIMO presents a world of possibilities for autonomous navigation: Mapping Independent navigation Obstacle avoidance and route planning Simultaneous localization and mapping (SLAM and V-SLAM)
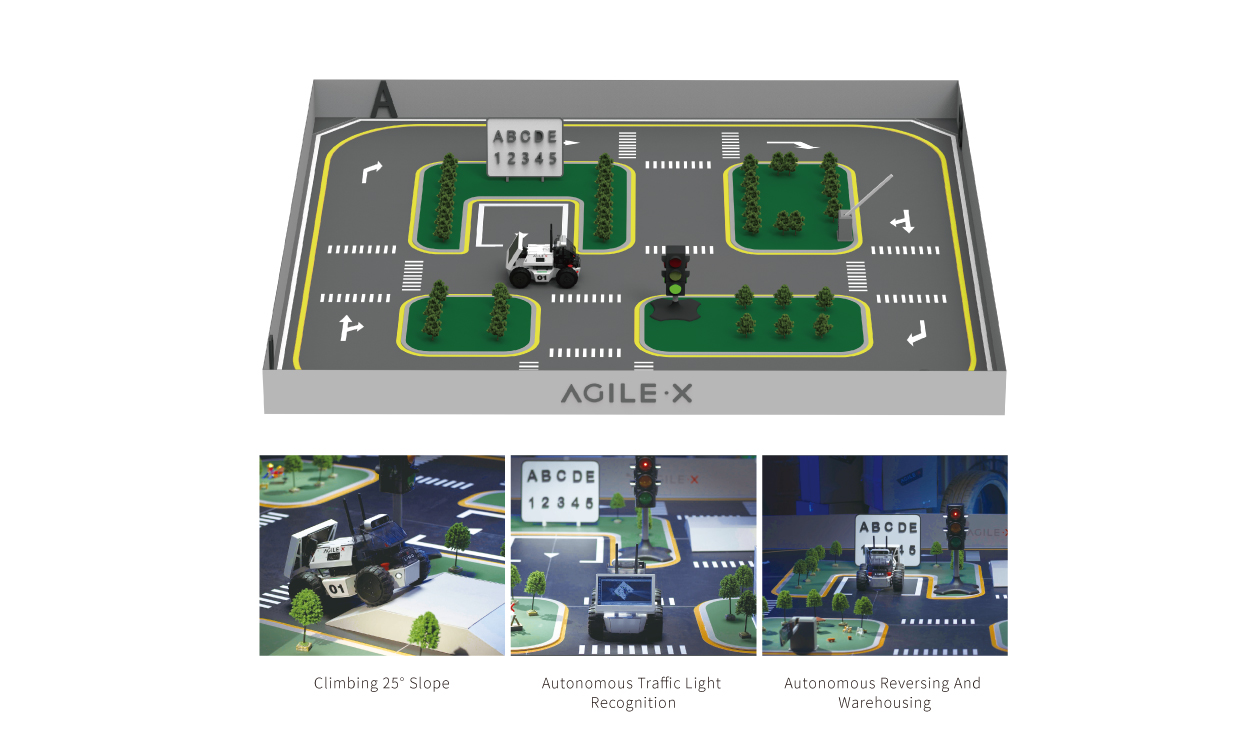
Simulation Table
LIMO comes with a specially designed simulation table. Fun and convenient, the simulation table can help you quickly simulate and test your model applications in the realistic scenarios.
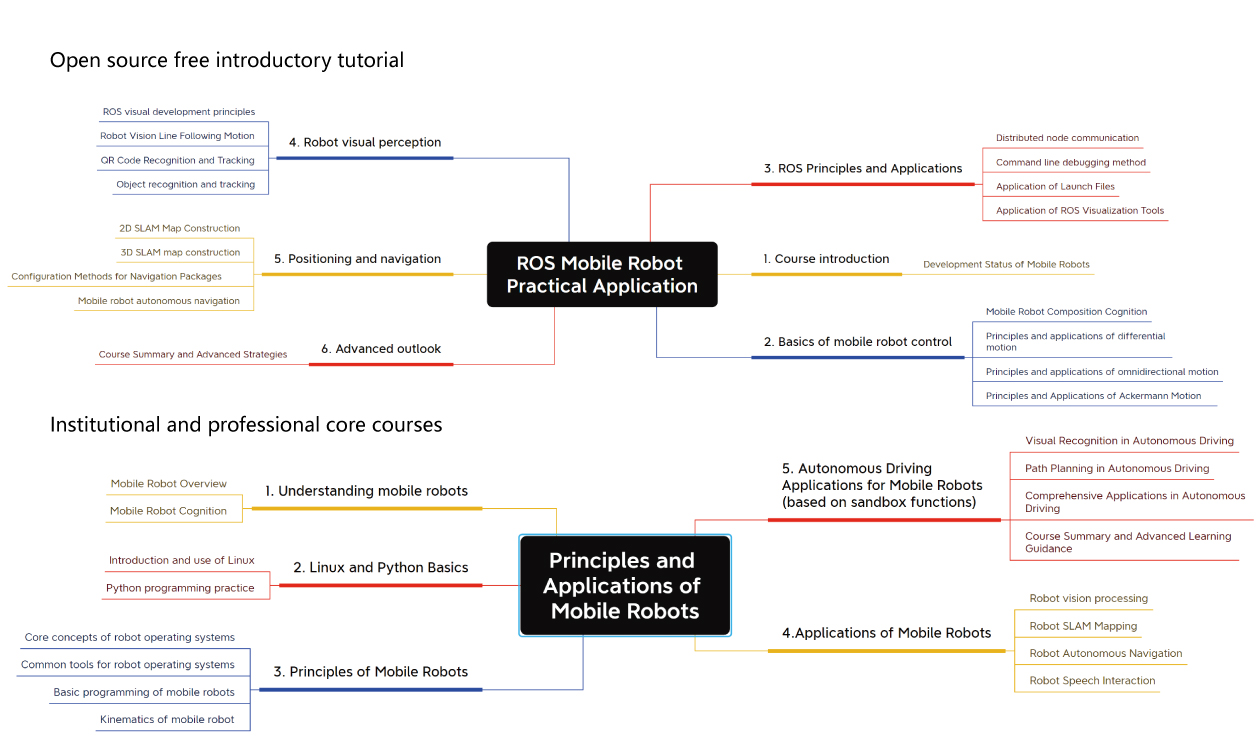
ROS System Training
The course offers a ROS system training platform and comprehensive materials, including guides, study resources, teaching presentations, and code samples, making teaching and learning simpler.
Technical Params

Limo, the first multi-modal mobile Robot with AI modules and ros demo
