Tracked Mobile Robot
Bunker is an industrial robot with a tracked mobile robot system intended for complex outdoor environments with rugged terrain and applications that require a high payload capacity.
Crawler-type Differential Wire-controlled Mobile Robot
BUNKER has extremely strong terrain adaptability. it is specially designed for special working environment and features deferential rotation, strong load capacity, small mechanical loss and high ingress protection rating.


Enhanced Drivetrain & Robust Suspension
BUNKER boasts powerful motors and a sturdy drivetrain, enabling it to conquer obstacles with ease.
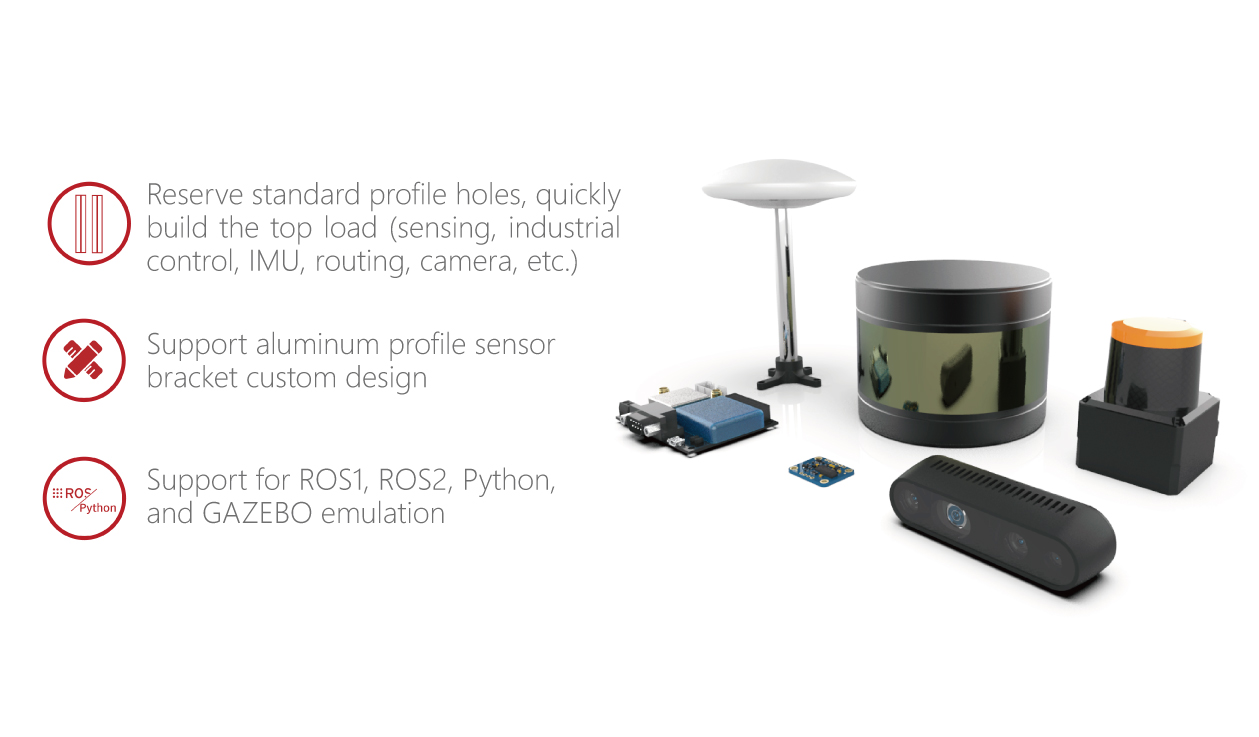
Expansion and Secondary Development
BUNKER allows users to establish connections using the CAN bus protocol. It's also complemented with an open-source SDK and software resources.
Technical Params
Dimensions
1023*778*400mm W*H*D
Wheelbase
360mm
Weight
145-150Kg
Operating Temperature
-10~45°C
Drive Form
Left and Right lndependent Drive Track Differential Steering
Charger
AC220VIndependent Charger
Charging Time
6~7H
Minimum Ground Clearance
90mm
Rated Travelling Load
70KG
Outward Supply
48V
Battery
48V30Ah(Standard) 48V60Ah(Optional)
Rated Spin Load
60KG
Motor
2X650W(brushless servo motor)
Climbing Capacity
36°(No Load and With Loading) Can Climb Stairs
Code Wheel
1024 Lines
Minimum Turning Radius
0m In-situ Rotation
Gyroscope Parameters
9-axis Gyroscope 0.01°Resolution
Obstacle Abilit
170mm
MAX Travel
10KM
Suspension Form
Christie Suspension
Communication
InterfaceStandard CAN
Protection Level
P52(Standard) IP54(Optional)
Shock Absorber
Left and Right Lndependent * 6 Shock Absorbers

AgileX Robotics Tracked UGV BUNKER With High Payload and Off-Road Performance
